|
|

|

|
| e-Pub |
Section: New Results
Physical simulation and multisensory feedback
Physically-based simulation and collision detection
Fast collision detection for fracturing rigid bodies Loeiz Glondu, Maud Marchal
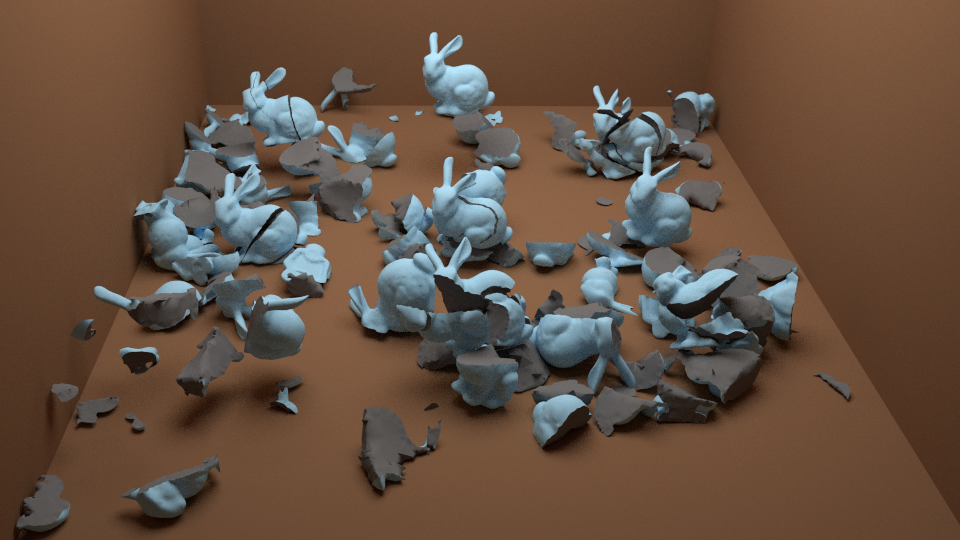
In complex scenes with many objects, collision detection plays a key role in the simulation performance. This is particularly true in fracture simulation for two main reasons. One is that fracture fragments tend to exhibit very intensive contact, and the other is that collision detection data structures for new fragments need to be computed on the fly. In [17] , we present novel collision detection algorithms and data structures for real-time simulation of fracturing rigid bodies. We build on a combination of well-known efficient data structures, namely distance fields and sphere trees, making our algorithm easy to integrate on existing simulation engines. We propose novel methods to construct these data structures, such that they can be efficiently updated upon fracture events and integrated in a simple yet effective self-adapting contact selection algorithm. Altogether, we drastically reduce the cost of both collision detection and collision response. We have evaluated our global solution for collision detection on challenging scenarios, achieving high frame rates suited for hard real-time applications such as video games or haptics. Our solution opens promising perspectives for complex fracture simulations involving many dynamically created rigid objects.
This work was achieved in collaboration with Miguel Otaduy and Sara Schvartzman (URJC Madrid, Spain) and Georges Dumont (MIMETIC team).
Collision detection: broad phase adaptation from multi-core to multi-GPU architecture Bruno Arnaldi, Valérie Gouranton
We have presented several contributions on the collision detection optimization centered on hardware performance. We focus on the first step (Broad-phase) and propose three new ways of parallelization of the well-known Sweep and Prune algorithm. We first developed a multi-core model takes into account the number of available cores. Multi-core architecture enables us to distribute geometric computations with use of multi-threading. Critical writing section and threads idling have been minimized by introducing new data structures for each thread. Programming with directives, like OpenMP, appears to be a good compromise for code portability. We then proposed a new GPU-based algorithm also based on the "Sweep and Prune" that has been adapted to multi-GPU architectures. Our technique is based on a spatial subdivision method used to distribute computations among GPUs. Results show that significant speed-up can be obtained by passing from 1 to 4 GPUs in a large-scale environment [12] .
Real-time tracking of deformable target in ultrasound images Maud Marchal
In several medical applications such as liver or kidney biopsies, an anatomical region needs to be continuously tracked during the intervention. When using ultrasound (US) image modality, tracking soft tissues remains challenging due to the deformations caused by physiological motions or medical instruments, combined with the generally weak quality of the images. In order to overcome the previous limitation, different techniques based on physical model have been proposed in the literature. In [41] , we propose an approach for tracking deformable target within 2D US images based on a physical model driven by smooth displacement field obtained from dense information. This allows to take into account highly localized deformation in the US images.
This work was achieved in collaboration with Lucas Royer and Alexandre Krupa (Lagadic team), Anthony Le Bras (CHU Rennes) and Guillaume Dardenne (IRT B-Com).
Multimodal feedback
Stereoscopic Rendering of Virtual Environments with Wide Field-of-Views up to 360 Jérôme Ardouin, Anatole Lécuyer, Maud Marchal
We propose a novel approach [23] for stereoscopic rendering of virtual environments with a wide Field-of-View (FoV) up to 360. Handling such a wide FoV implies the use of non-planar projections and generates specific problems such as for rasterization and clipping of primitives. We propose a novel pre-clip stage specifically adapted to geometric approaches for which problems occur with polygons spanning across the projection discontinuities. Our approach integrates seamlessly with immersive virtual reality systems as it is compatible with stereoscopy, head-tracking, and multi-surface projections. The benchmarking of our approach with different hardware setups shows that it is well compliant with real-time constraints, and capable of displaying a wide range of FoVs. Thus, our geometric approach could be used in various VR applications in which the user needs to extend the FoV and apprehend more visual information.
This work was achieved in collaboration with Eric Marchand (Lagadic team).
A survey on bimanual haptics Anatole Lécuyer, Maud Marchal, Anthony Talvas.
When interacting with virtual objects through haptic devices, most of the time only one hand is involved. However, the increase of computational power, along with the decrease of device costs, allow more and more the use of dual haptic devices. The field which encompasses all studies of the haptic interaction with either remote or virtual environments using both hands of the same person is referred to as bimanual haptics. It differs from the common unimanual haptic field notably due to specificities of the human bimanual haptic system, e.g. the dominance of the hands, their differences in perception and their interactions at a cognitive level. These specificities call for adapted solutions in terms of hardware and software when applying the use of two hands to computer haptics. In [21] , we review the state of the art on bimanual haptics, encompassing the human factors in bimanual haptic interaction, the currently available bimanual haptic devices, the software solutions for two-handed haptic interaction, and the existing interaction techniques.
Haptic cinematography Fabien Danieau, Anatole Lécuyer
Haptics, the technology which brings tactile or force-feedback to users, has a great potential for enhancing movies and could lead to new immersive experiences. In [14] we introduce Haptic Cinematography which presents haptics as a new component of the filmmaker's toolkit. We propose a taxonomy of haptic effects and we introduce novel effects coupled with classical cinematographic motions to enhance video viewing experience. More precisely we propose two models to render haptic effects based on camera motions: the first model makes the audience feel the motion of the camera and the second provides haptic metaphors related to the semantics of the camera effect. Results from a user study suggest that these new effects improve the quality of experience. Filmmakers may use this new way of creating haptic effects to propose new immersive audiovisual experiences.
This work was achieved in collaboration with Marc Christie (MIMETIC team), Julien Fleureau, Philippe Guillotel and Nicolas Mollet (Technicolor).